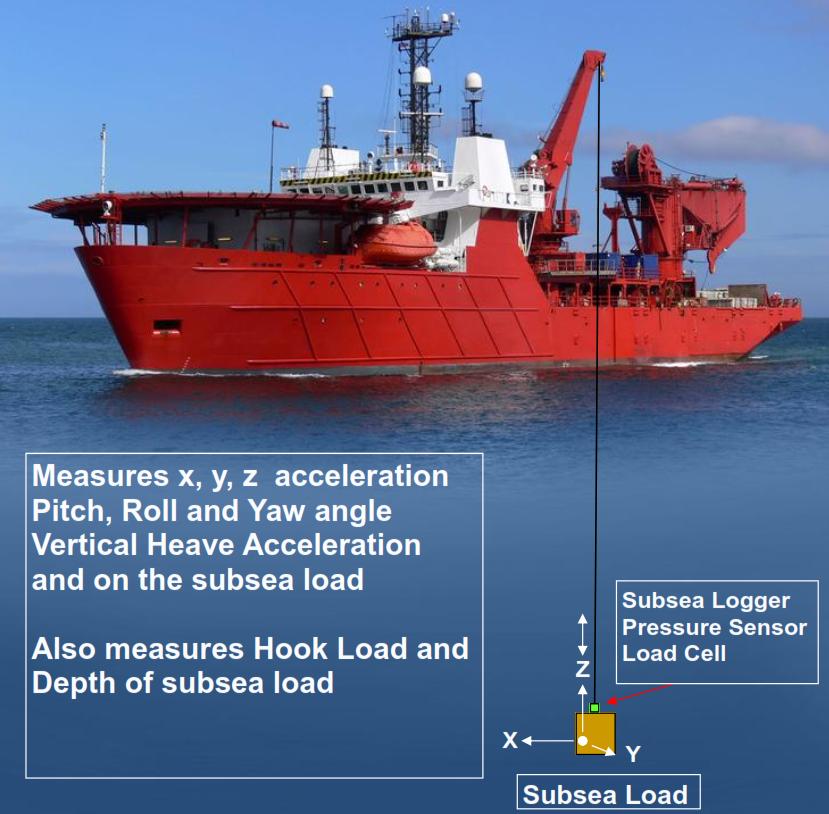
System description: The subsea logging unit has an internal inertial measurement unit (IMU) for measurement of pitch, roll and yaw euler angles, x,y,z linear acceleration and heave motion. The subsea unit can also accept external sensors for depth, load and other parameters as required. The external sensors are connected via PU cable with subcon connectors. The subsea unit is powered by an 8AH 12v battery to provide a minimum operation time of 24 hours. A charging unit is supplied to re-charge the battery. The power to the unit is turned on/off via an external plug. Subsea bulkhead connectors are also provided for USB data communications, start/stop logging, and battery charging.


 +44 (0) 845 9000 602
+44 (0) 845 9000 602 [email protected]
[email protected]

